+86 13713990149
+86 13713990149 sales@huceen.com
sales@huceen.comApplication of Huceen H7-200Smart PLC in handling robot workstation
![]() 2024-03-11
2024-03-11
![]() Huceen
Huceen
As the labor costs of global manufacturing companies continue to rise, industrial robots have begun to be widely used in various industries. Compared with traditional industrial equipment, industrial robots are intelligent, easy to use, have high production efficiency and safety, can operate in high-risk environments, and are easy to use. management and significant economic benefits. Depending on the production scenario, a workstation model usually appears with PLC as the core combined with industrial robots, conveying equipment, sensors, and other components.
This project is an automated handling system in the production process of certain decoration materials. The system includes conveying equipment, leveling machines, handling robots, and electronic control systems.
Workflow: The weighed and bagged materials are transported to the leveling machine through the conveying equipment. The leveling machine's function is to level the position of the materials on the conveyor belt and then transfer them to the grabbing station, where the materials are then grabbed by the handling robot. Place it into the material tray.
Intelligent handling: There are two material trays for stacking materials in the system. The user can set the number of material layers for each material tray. When the set number of layers is reached, the system will give the production staff a prompt that the materials are full and start to move to the other tray. Material trays are used to stack materials.
Interlocking shutdown: Each section of conveying equipment is equipped with a detection probe and has an interlocking shutdown function to prevent material blocking.
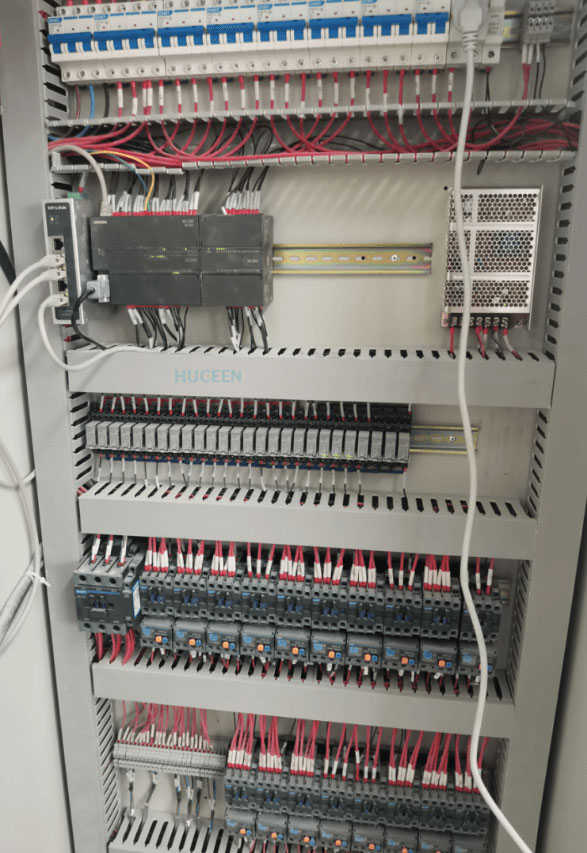
The main control system of the system uses Huceen H7-200Smart series PLC. The network port of the CPU communicates with the robot through the Modbus TCP protocol, sends grabbing commands and material tray selection commands, and reads the robot status signal and work completion bit signal. The CPU body comes with The RS485 port is used for data interaction with the touch screen. The digital input points collect equipment operation, fault, and material probe signals. The digital output points are used to control equipment, gripper cylinders, and indicator lights.
Project Introduction
This project is an automated handling system in the production process of certain decoration materials. The system includes conveying equipment, leveling machines, handling robots, and electronic control systems.
The main function
Workflow: The weighed and bagged materials are transported to the leveling machine through the conveying equipment. The leveling machine's function is to level the position of the materials on the conveyor belt and then transfer them to the grabbing station, where the materials are then grabbed by the handling robot. Place it into the material tray.
Intelligent handling: There are two material trays for stacking materials in the system. The user can set the number of material layers for each material tray. When the set number of layers is reached, the system will give the production staff a prompt that the materials are full and start to move to the other tray. Material trays are used to stack materials.
Interlocking shutdown: Each section of conveying equipment is equipped with a detection probe and has an interlocking shutdown function to prevent material blocking.
Control system introduction
The main control system of the system uses Huceen H7-200Smart series PLC. The network port of the CPU communicates with the robot through the Modbus TCP protocol, sends grabbing commands and material tray selection commands, and reads the robot status signal and work completion bit signal. The CPU body comes with The RS485 port is used for data interaction with the touch screen. The digital input points collect equipment operation, fault, and material probe signals. The digital output points are used to control equipment, gripper cylinders, and indicator lights.